


Semu unu di i fornitori FA One-stop più prufessiunali in Cina. I nostri prudutti principali includenu servomotori, riduttori planetari, inverter è PLC, HMI. Marche cumprese Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron è ecc.; Tempu di spedizione: Entro 3-5 ghjorni lavorativi dopu avè ricevutu u pagamentu. Modu di pagamentu: T/T, L/C, PayPal, West Union, Alipay, Wechat è cusì.
Dettagli di e Specifiche
| Articulu | Specifiche |
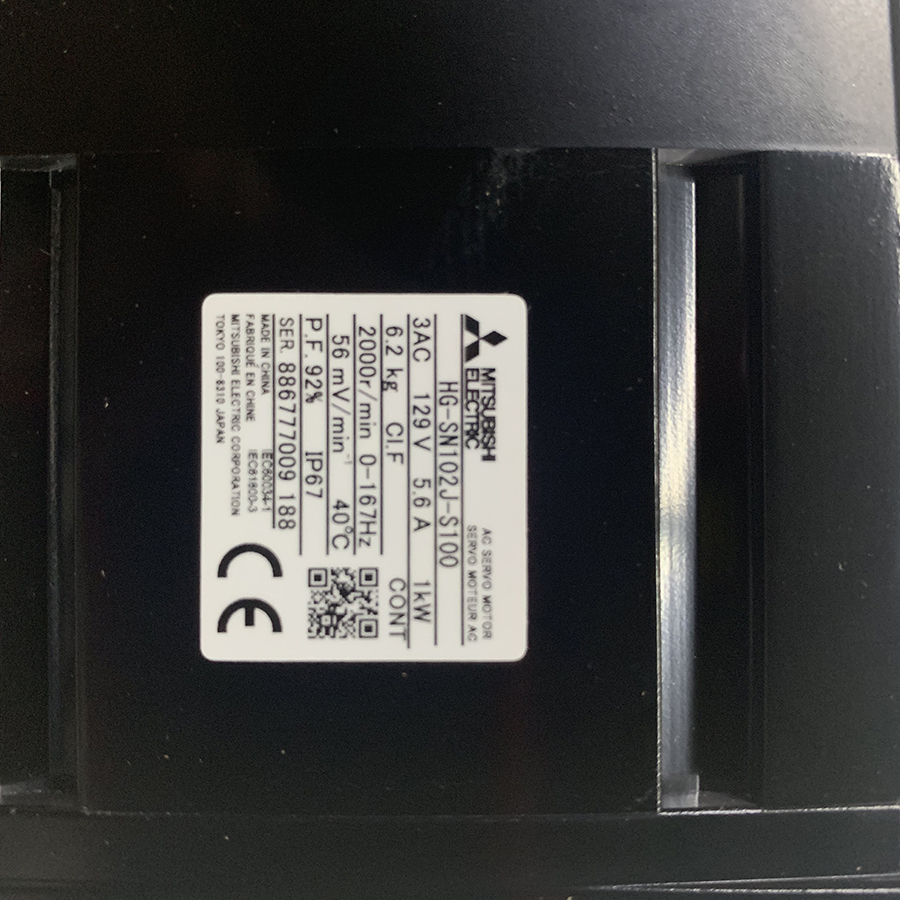
| Modellu | HG-SN102J-S100 |
| Marca | Mitsubishi |
| Nome di u pruduttu | Servomotore AC |
| Putenza | 5,0 kW |
| Tensione | 400V |
| Frequenza | 900 (KHz) |
| Serie di prudutti / nome di famiglia | Serie MELSERVO JE |
| Corrente nominale | 5.6A |
| Potenza attiva nominale | 1000W / 1kW |
| Gradu di prutezzione | IP67 |
| Corrente massima | 17 A |
| Carica radiale massima | 980 N |
| Carica assiale massima | 490 N |
| Coppia nominale | 4,77 Nm |
| Coppia massima | 14,3 Nm |
| Risoluzione | 17-bit |
| Dimensione | 130mm x 130mm x 132,5mm |
| Pesu nettu | 6,2 chilò |
Un signale AC custante cum'è entrata hè furnitu à l'avvolgimentu principale di u statore. Tuttavia, cum'è u nome suggerisce, l'avvolgimentu di cuntrollu hè furnitu cù a tensione di cuntrollu variabile. Questa tensione di cuntrollu variabile hè ottenuta da l'amplificatore servo. Ci vole à nutà quì chì per avè un campu magneticu rotante, a tensione applicata à l'avvolgimentu di cuntrollu deve esse 90° sfasata rispettu à a tensione AC d'entrata.
Rotore: U rotore hè generalmente di dui tipi; unu hè di tipu à gabbia di scoiattolu mentre l'altru hè di tipu à tazza di trascinamentu.
U tipu di rotore à gabbia di scoiattolu hè mostratu quì sottu: rotore à gabbia di scoiattolu In questu tipu di rotore, a lunghezza hè grande mentre u diametru hè chjucu è hè custruitu cù cunduttori d'aluminiu cusì pesa menu. Hè da nutà quì chì e caratteristiche coppia-velocità di un mutore à induzione nurmale anu regioni di pendenza sia pusitivi sia negativi chì rapprisentanu regioni instabili è stabili, rispettivamente.
Tuttavia, i servomotori AC sò cuncepiti per pussede una alta stabilità, dunque e so caratteristiche di slittamentu di coppia ùn devenu micca avè una regione di slittamentu pusitivu. In più di questu, a coppia sviluppata in u mutore deve riduce in modu lineare cù a velocità.
Per ottene questu, a resistenza di u circuitu di u rotore deve avè un valore altu, cù una bassa inerzia. Per via di questu mutivu, durante a custruzzione di u rotore, u rapportu diametru-lunghezza hè mantinutu più chjucu. I spazii d'aria ridotti trà e barre d'aluminiu in u mutore à gabbia di scoiattolu facilitanu una riduzione di a corrente di magnetizazione.
À propositu di a serie J4 Mitsubishi:
Per risponde à una gamma crescente d'applicazioni, cumprese a fabricazione di semiconduttori è LCD, robot è macchine per a trasfurmazione di l'alimentu, MELSERVO-J4 si combina cù altre linee di prudutti Mitsubishi Electric cum'è cuntrolli di muvimentu, rete, terminali d'operazione grafica, cuntrolli programmabili è assai di più. Questu vi dà a libertà è a flessibilità di creà un sistema servo più avanzatu.
-À propositu di a serie J5 Mitsubishi:
(1) Prugressività
Per l'evoluzione di e macchine
Migliuramentu di e prestazioni
Standardizazione di u prugramma
(2) Cunnettività
Per un sistema flessibile
Cunfigurazioni
Integrazione cù i dispusitivi cunnessibili
(3)Usabilità
Per un principiu rapidu di l'operazione
Migliuramentu di l'arnesi
Migliurata usabilità di u sistema di trasmissione
(4) Mantenibilità
Per una rilevazione immediata è
diagnosi di fallimenti
Mantenimentu predittivu/preventivu
Mantenimentu currettivu
(5) Patrimoniu
Per l'utilizazione di l'esistenti
(6) dispusitivi
Intercambiabilità cù u precedente
(7) mudelli di generazione
-À propositu di a serie JET Mitsubishi
-À propositu di a serie JE Mitsubishi
-À propositu di a serie JN Mitsubishi
-

MR-J2S-70B-PY135U054 Azionamentu Mitsubishi per servo...
-

Driver di amplificatore Mitsubishi originale MR-J3-100B
-

Servomotore Mitsubishi HF-KR13BJ Motore Giapponese
-

Novu è originale servomotore Mitsubishi Giappone...
-

Driver di servomotori Mitsubishi Giappone MR-JE-100A
-

Servomotore Mitsubishi AC MR-J2S-60A4




